|
 |
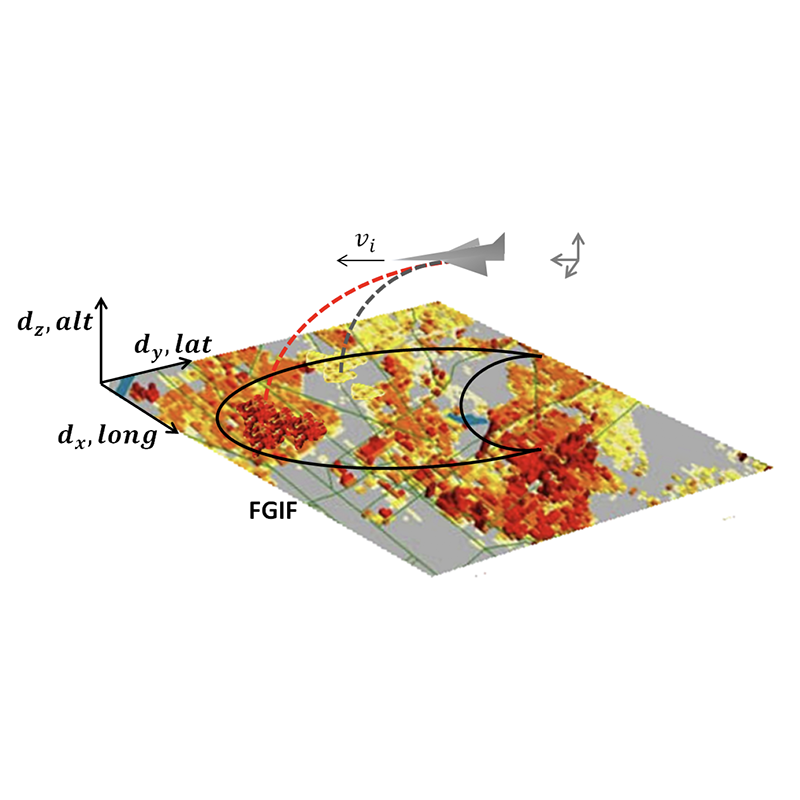
Fig. 5 from the paper. Depiction of FGIF and coordinate system, where dx, dy, and dz represent displacement in longitude, latitude, and altitude directions, respectively. UAV’s reachable footprint is represented by semicircle contour labeled FGIF. |
|
Most of us have heard the claim that "sometime soon" companies will be using unmanned aerial vehicles (UAVs) for package delivery. The integration of UAVs into the National Airspace System (NAS) for this and other purposes has been touted for some time; however, there remain a number of practical problems to be solved before this can happen. Chief among these is improving the safety of UAVs.
UAVs can collide with other aircraft, or crash into the ground, structures or people. These hazards pose a large risk to the general public, with casualties being a worst-case scenario. UAVs can have accident rates as high as 32 accidents per 100,000 flight hours. This is 32 times higher than the accident rates for small general aviation aircraft, and 3,200 times higher than for large airliners.
Additional safety measures are needed for UAVs before they can be integrated into the NAS. This includes new technologies that allow for safer flight control and response to anomalies during flight. Software for autonomous control should allow the UAV to detect and avoid potential hazards, as well as respond to critical failures midflight without input from a human operator.
Assistant Professor Huan Xu (AE/ISR), alumnus Andrew Poissant (MSSE 2018), and Assistant Research Scientist Lina Castano (AE) have developed a software module for UAV hazard mitigation that guards against ground impact in highly populated areas. Their paper, Mitigation of Ground Impact Hazard for Safe Unmanned Aerial Vehicle Operations, has been published in the December 2020 issue of the AIAA Journal of Aerospace Information Systems.
The researchers concentrated on dealing with both propulsion and actuator faults. Their ground impact and hazard mitigation (GIHM) software considers engine and control surface failure flight modes, generates feasible ground impact footprints based on glide equations, and selects the safest response ground impact sites based on a high-resolution LandScanUSA population dataset. The software also can control the UAV’s descent to a selected site.
The module is particularly helpful in guarding against ground impact in highly populated areas. If the UAV experiences a fault that will cause it to crash, GIHM locates a crash point within an estimated reachable ground area that minimizes expected casualties. The software's success rates are higher when there are low population areas that the UAV can resort to when it experiences a fault.
Integrating the new GIHM with standard UAV flight software can reduce maximum casualty expectation by 97 percent compared to flight software alone. Its use will help to bring UAVs closer to being safe enough for integration into the NAS.
In the future the researchers plan to examine how uncertainties in different UAVs and environment parameters may affect the performance of GIHM. They also will develop fault modes for accelerated aircraft experiencing various control surface malfunctions and explore fault detection methods. In addition, they will integrate a collision detection and avoidance module, add topology data for landing site considerations, and develop a more sophisticated decision-making engine that allows the UAV to execute various flight control instability mitigation maneuvers during flight anomalies before diagnosing a fault mode.
Read more about Huan Xu's UAV research in this story by Robert Herschbach (AE) that overviews her work.
Related Articles:
New algorithms for multi-robot systems in low communication situations
UMD Team Wins Inaugural NIST UAS 3.1: FastFind Challenge
Derek Paley's e-scooter work featured in Washington Post
Paley receives ONR funding for cross-domain cooperative control
A cooperative control algorithm for robotic search and rescue
Aerodynamic interaction model improves quadrotor flight stability in gusty winds
Diving Deeper into Competition, and Recruitment
UMD Student Team Lauded for Award-Winning Drone
CareDx Acquires UMD-linked Transplant Tech Firm
“Gambit” Pays Off in UMD Team’s Search-and-Rescue Competition Win
October 15, 2020
|
